R.I.N.Gの取説 #Mincraft #JointBlock #R.I.N.G.
アドオンの作成 ←まとめ記事一覧→ JointBlockの取説
JointBlock配布 →Ver0.8検証
質問等はツイッター @makaraegにDMか コメントまで
────────────────────────────
・R.I.N.G.ついて分析 ←フォーラムのアップデート元記事を抜粋し解説つけてます。
R.I.N.G.配布時の記事を見たい時とかにどうぞ
・更新履歴 古いのは下の方
2019.8/18 R.I.N.G.エディット操作>既オペ遮断に加筆
─────────────────────────────────
R.I.N.G.の使い方と仕様の説明記事です。
具体例ではなく、各ノードの項目説明を中心に書いてます。
もくじ
1章 R.I.N.G.概要
■R.I.N.G.の基本
R.I.N.G.を組む時の基本的な部分を説明です。
■ノードの種類と簡単な説明
3つの系統とノードのリスト、簡単な説明をしてます。
2019.8/18 R.I.N.G.エディット操作>既オペ遮断に加筆
─────────────────────────────────
R.I.N.G.の使い方と仕様の説明記事です。
具体例ではなく、各ノードの項目説明を中心に書いてます。
もくじ
1章 R.I.N.G.概要
■R.I.N.G.の基本
R.I.N.G.を組む時の基本的な部分を説明です。
■ノードの種類と簡単な説明
3つの系統とノードのリスト、簡単な説明をしてます。
■R.I.N.G.エディットの操作
操作方法の説明です。
2章 各ノード解説 →上級者向け()
■ノードの項目説明と、基本的な用語説明
R.I.N.G.で使う用語や、ノード内で使われてる項目の説明です。
■ノードの詳細
各ノードの使い方や、設定項目を細かく説明してます。
青文字部分は、まからの注釈です。
■跡地 ノード毎のサンプルとか関連動画とか載せるかも。
──────────────────────────────────────
1章 R.I.N.G.概要
■R.I.N.G.のきほん
R.I.N.G.の動き方、設定の仕方の基本的です。
●概要 
R.I.N.G.とは、JointBlockのユニットに組み込む命令パーツのことで、
コアに命令を組んだR.I.N.G.を入れることで、
様々な動きを自動でさせる事ができます。
・ノード
命令はR.I.N.G.のGUIを開き、「ノード」と呼ばれる動作や判断の書かれたパーツを並べ
パーツ同士をラインで結び、「どの条件で」「どのような動きを」するかを指示します。
ノードには以下の3タイプが有ります。※後記参照
構文系ノード(ST:SyntaxNode) 「プログラムを書くノード」
指示系ノード(DR:DirectionNode) 「動かすノード」
検知系ノード(TG:TriggerNode) 「動きを受信するノード」
・時計回りにノードを動かしていく。
GUIに配置されたノードは、途中に分岐を書いたり、別ページに飛ぶなども指定する事が
できますが、基本的に時計回りに動作していきます。
・ノードには入力値と出力値がある
ノードに設定する数値は、ノードに直接書いておく「固定値(F)」と、
他ノードの出力値を使う「参照値(R)」があります。
参照値を使う場合は、チェックボクスにチェックを入れてノード番号を入れるか、
ドラッグドロップして他のノードと繋ぐことでで設定できます。
●分岐のさせ方
時計回りの途中で条件によって別の動きをさせる場合(分岐させる場合)
IFジャンプノードをを使います。例えば「キー状態検知ノード」で任意のキーが
押されてるか見て、押されたら別のノードに飛ぶとか、押されて無かったら
ノードを実行させない、と言った感じです。
※ちなみに検知系ノードはR.I.N.G.上で踏まなくても数値が変わるので、
周回からハズすとR.I.N.G.の動きを早くできます。
・IFジャンプノード 
条件式です。 そこを通過するとき条件に合ってたら、指定先のノードに飛ばします。
入力値が False(間違ってる=0)時飛ぶか、
Ture(合ってる=1)時飛ぶか、あとerrで飛ぶなど選べます。
入力値は他のノードを参照させるます。
※自分を参照させると常にFalseなので、強制的に飛ばす事もできます。
・ジャンプ用によく使う参照先ノード
いろいろだけど基本的なものはこんなノードの値をみてジャンプさせます。
ー指示系:ローテータ指示などの出力値
動いてる間はTure、止まってるときはFalseになっています。
ー2値オペ:二つの値を比べるノード。大小=など色々な比べ方を出来る。
比べる値も参照させればいいので、距離がいくつ以上離れてるかとか、
同じ値かとか、色々判定させれる。
ー検知系:「検知系ノード」は、座席に乗ってるかとか、生きてるかとか、
色んな状況を検知させれるので、その値で飛ばす事ができる。
ーセンサー系:対象を見つけられない時errを吐くので、errだったら飛ばせる。
なおセンサーは本来は、直接使うのではなく、センサーで
拾ったEntityIDから検知系ノードを使い数値を引き出して使います。
・指示系ノード
上のように流れを組んで、実際に何かさせる時このノードを挟む。
ロテタを回したり、チャネル経由でアクションさせたりいろいろ。
チャネルに指示を出す場合は、動かしたいブロックに「モーションチャネルMCTRL」
を入れて、チャネル番号をセットしておきます。
※動作中指示の上書きはできず、また次のTickから動くので、数値のセットだけではなく
IFジャンプノードやウェイトノードでのタイミングの制御も必要になってきます。
・他リンク呼び出し
別ページに飛ばすノード。
ページを追加してやって、このノードにページ番号とノード番号を書いておくと、
このノードにきた時、別ページに移って動きます。
そのページに「リターンノード」 を置いてそこを通ったら
を置いてそこを通ったら
飛んできた元の他リンク呼び出しノードに戻ります。
戻る際は、1つ値を他リンク呼び出しノードに持ち帰れる事ができます。
※入れ子は4段まで。4つ越えるとトコロテン式に消えます。
自ページ内で飛ばせば簡単にループを作れますが、他のノードを動かすと
参照先ノードを自動で修正したり消すので注意が必要です。
──────────────────────────────────────
■ノードの種類と簡単な説明
ノードの種類 ※詳細は下の方参照 (出力値だけでも書いとくと便利かも。)
●ノードのカテゴリー
●構文系ノード(ST:SyntaxNode) 「プログラムを書くノード」
RING内でノードの行き先を指定したり、数値を用意したりする。
ノード同士は構文を挟まなくても、入力で参照させる事が出来る。
 空ノード 「ジャンプ先とか見やすくする為とか」
空ノード 「ジャンプ先とか見やすくする為とか」
IFジャンプノード 「条件で別ノードに移動」
 ウェイトノード 「まつ。1Tickは1/10秒」
ウェイトノード 「まつ。1Tickは1/10秒」
他リング呼出ノード「べつのページに移動する。」
リターンノード 「元のページにもどる」
 変数ノード 「数値を覚えとく」
変数ノード 「数値を覚えとく」
 2値オペノード 「2つの値を見比べる」
2値オペノード 「2つの値を見比べる」
 1値オペノード 「色々計算して値を変える」
1値オペノード 「色々計算して値を変える」
 ミラーリンクノード「別ページのノードの値を参照する」
ミラーリンクノード「別ページのノードの値を参照する」
 ベクタノード 「4つの数値を同時に扱うノード」
ベクタノード 「4つの数値を同時に扱うノード」
●指示系ノード(DR:DirectionNode) 「動かすノード」
実際に何かを動かす指示をするノード。何を動かすか、どう動かすかを書く。
モーション変更指示ノード
・ ローテータ 「ロテタを回す。」
ローテータ 「ロテタを回す。」
・ エクステンダー 「エクスを伸ばす。」
エクステンダー 「エクスを伸ばす。」
・ スライダー 「スライダーを動かす。」
スライダー 「スライダーを動かす。」
・ スケーラー 「スケーラーを動かす。」
スケーラー 「スケーラーを動かす。」
 アトラクター指示ノード「アトラクターを動かす。」
アトラクター指示ノード「アトラクターを動かす。」
 アクション指示ノード 「チャネルへアクションを指示」
アクション指示ノード 「チャネルへアクションを指示」
 エフェクト指示ノード 「音やパーティクルを指示する。」
エフェクト指示ノード 「音やパーティクルを指示する。」
 ターゲット回転ノード 「ロテタの向きをターゲットに向ける」
ターゲット回転ノード 「ロテタの向きをターゲットに向ける」
 移動指示ノード 「指示した方向に移動する。」
移動指示ノード 「指示した方向に移動する。」
 移動タスク指示ノード 「追いかけたり逃げたりさせる。」
移動タスク指示ノード 「追いかけたり逃げたりさせる。」
 Yaw更新指示ノード 「ユニットの向きを変える」
Yaw更新指示ノード 「ユニットの向きを変える」
 Yaw追従指示ノード 「シートの向きにユニットの向きを変える」
Yaw追従指示ノード 「シートの向きにユニットの向きを変える」
 キー使用指示ノード 「汎用キーを使用させる。」
キー使用指示ノード 「汎用キーを使用させる。」
 アイテム使用指示ノード「アイテムMCTRLを使用させる。」
アイテム使用指示ノード「アイテムMCTRLを使用させる。」
 Entity検索指示ノード 「センサーに何を探すか指示する」
Entity検索指示ノード 「センサーに何を探すか指示する」
 ターゲット指示ノード 「距離とかターゲット情報を取り出す。」
ターゲット指示ノード 「距離とかターゲット情報を取り出す。」
 chクリアノード 「いろんなチャネルをクリアさせる」
chクリアノード 「いろんなチャネルをクリアさせる」
 モード変更指示ノード 「モード変更させる。」
モード変更指示ノード 「モード変更させる。」
●検知系ノード(TG:TriggerNode) 「動きを受信するノード」
状態を調べて数値にするノード。これを見て指示を出すことが多い。
 キー状態検知ノード 「汎用キーが押されてるか見る」
キー状態検知ノード 「汎用キーが押されてるか見る」
 アイテム状態検知ノード 「アイテムMCTRLを使ってか見る。」
アイテム状態検知ノード 「アイテムMCTRLを使ってか見る。」
 座席状態検知ノード 「座ってるかとか座席の状態をみる。」
座席状態検知ノード 「座ってるかとか座席の状態をみる。」
 プレイヤー状態検知ノード「HPとかENとかプレイヤーの状態を見る。」
プレイヤー状態検知ノード「HPとかENとかプレイヤーの状態を見る。」
 ユニット移動検知ノード 「向きとか移動状態を見る。」
ユニット移動検知ノード 「向きとか移動状態を見る。」
 ユニット状態検知ノード 「HPやスレーブ、HPなどの状態を見る。」
ユニット状態検知ノード 「HPやスレーブ、HPなどの状態を見る。」
 ch状態検知ノード 「各チャネルの動いてる状態を見る。」
ch状態検知ノード 「各チャネルの動いてる状態を見る。」
 センサー状態検知ノード 「各センサーの座標や状態を見る。」
センサー状態検知ノード 「各センサーの座標や状態を見る。」
 ターゲット状態検知ノード「各ターゲットの向きや状態を見る。」
ターゲット状態検知ノード「各ターゲットの向きや状態を見る。」
 ジョイントパーツ状態検知ノード 「ブロックの初期値やモーション状態を見る。」
ジョイントパーツ状態検知ノード 「ブロックの初期値やモーション状態を見る。」
 Entity状態検知ノード 「対象の向きや座標、状態を見る。」
Entity状態検知ノード 「対象の向きや座標、状態を見る。」
 Block状態検知ノード 「指定座標ブロックの状態を見る。」
Block状態検知ノード 「指定座標ブロックの状態を見る。」
※Block指定はconfigに変更が必要
※検知系ノードは勝手に数値を拾ってくれるので、R.I.N.G.内で通る必要はないです。
ループの外に置いておけば、実行するノード数が減って動きがスムーズになります。
──────────────────────────────────────
■R.I.N.G.エディットの操作
GUIを開いた際の操作方法です。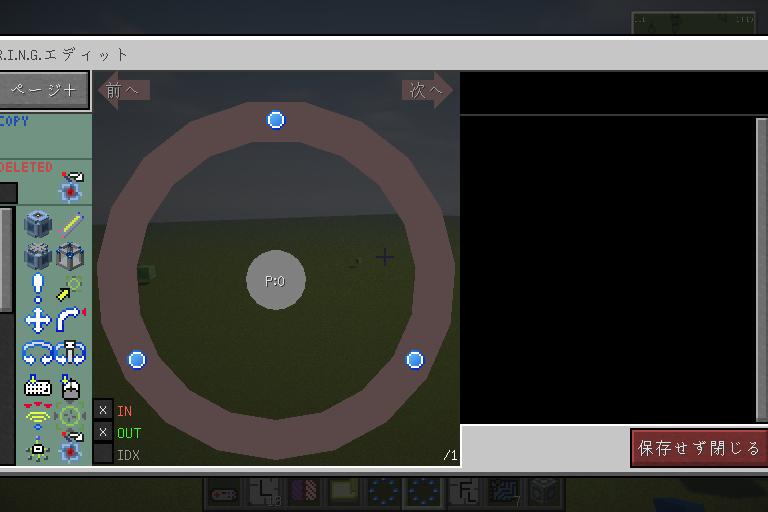
・ノードリスト
左側にあるのがノードリスト。
上で書かれてるノードが並んでるので、ドラックドロップでR.I.N.G.ウィンドに配置する。
・R.I.N.G.ウィンド
ノードを配置する場所。時計回りにノードが動いていき、24個まで配置できる。
左下のIN/OUT/IDXは、ノード間での参照先、ジャンプ先のラインとノード番号の
表示/非表示切替
・設定ウィンド
右部はノードやページを選ぶと、設定できる項目が出てくる。
・ページ名
R.I.N.G.ウィンドの中央にあるP:0をクリックして設定する。
0ページ目の名前がR.I.N.G.の名前になる。
全角半角含め16文字まで
ページ名以外にもR.I.N.G.全体の設定が出来るが、基本的には初期のままでOK
実行タイプ サイクル:通常 ショット:毎回0番ノードから動く
権限 R.I.N.G.の指示で動かない様にさせるとこ。
まとめて動かない様にするときには便利かも。
Mot:モーション Mov:移動 Act:アクション Key:キー指示
その他 既オペ遮断:コアの「op」と同じでR.I.N.G.以外の動きを止める。
チェック中はAWDSでの移動や汎用キーの使用、マウスでのYawPich変更が
なくなり、R.I.N.G.でキー検知>移動指示などが必要になる。2019.8/18加筆
・COPY
左上、ページ+の下の部分。
選択してCtrl+Cを押す事で、ここに記録される。
あとは個々からドラック&ドロップでノードを追加できる。
Shiftを押しながらクリックすれば、範囲でコピーも出来る。
Ctrl+Shift+Aを押すと、全ノードが選択され、纏めてコピーできる。
その場合、COPYのとこに入るアイコンはノードではなくR.I.N.G.になる。
コピーは別R.I.N.G.にも持っていけるので、Ctrl+Cした後、別R.I.N.G.のGUIを
開きCOPYからドロップ出来る。
※ただし、他リンク呼出ノードだけは、ページ番号・ノード番号共にリセットされる。
・DELETED
COPYの下部分。
R.I.N.G.ウィンド内のノードをサークル外にドラックドロップすると、サークルから
外れ、DELETEDに一時保管してくれます。
間違えて外した時や、同じのを何度も入れる時は便利かも。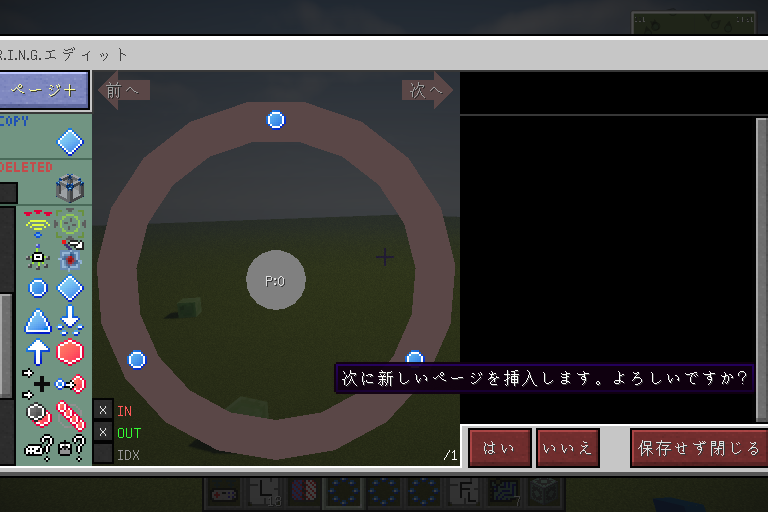
・ページ+
後ろにページを追加します。
追加されると上の「前へ」「次へ」で移動できるようになり、
移動するとサークル中央がP:xのページ番号が表示される。
削除する時は右上の「ページ削除」
CTRLを押すと「最初へ」「最後へ」に切り替わる。
※0ページ目の前には差し込めないで、1ページ目から作ると楽かも?
まぁ1ページ追加してごっそりCOPYすればいいけど、他リンクは再設定(´・ω・`)
──────────────────────────────────────
■ノードの項目説明と、基本的な用語説明
R.I.N.G.で使われる用語っす
・入力ノード 「参照先」
・チャネル 「指令先」動かしてる指示の格納場所
・ターゲット 「記録されている標的」1~5
・センサー 「観測元の座標」0~10 微妙に付いてる位置も重要。
コアに合わせてつければ視点=観測点になる。
※機体センサーは検知はできず位置情報の提供のみっぽい
・検索結果x 「EIDの保管場所」0~3 センサーが見つけたEIDを入れておく場所。
・EntityID 「対象のID」Minecraftで動くものに割り振られるID情報。略してEID
●入力ノード 「参照先」
ノード内だけの処理ではなく、別ノードから数値を参照する場合、
参照先(入力先)のノードを指定したりできる。
(Fとかチェックボックスが有る時はチェックを入れて、Rにすると出る
Fが固定値、Rが参照値)
ノード番号は左下のIN,Outの下のIDXにチェックを入れると円の内側に出てくる。
出力の方は出力先を指定することは無く数値を用意して見に来てくれるのを待つ
まつ(´・ω・`)
出力値はノードによってさまざまで、真偽値の0/1だったり、ERRだったり、
実数だったり用途による。 この辺プログラム経験ないと解んないかもね。
赤色のInって書かれた線が、入力ノードの参照先。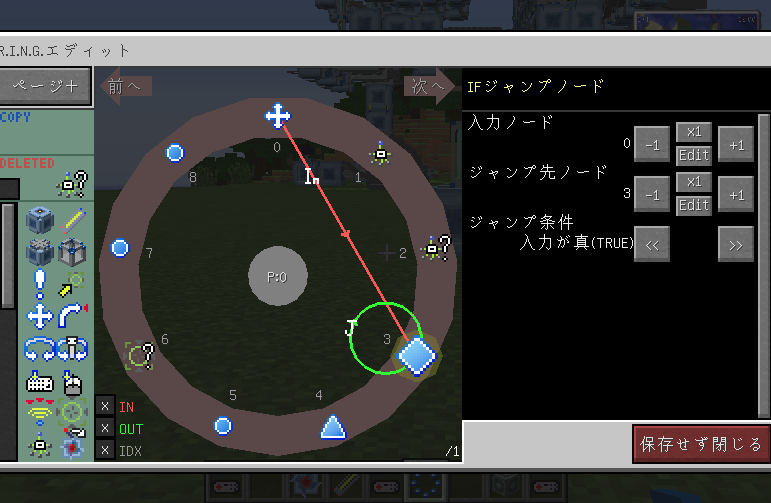
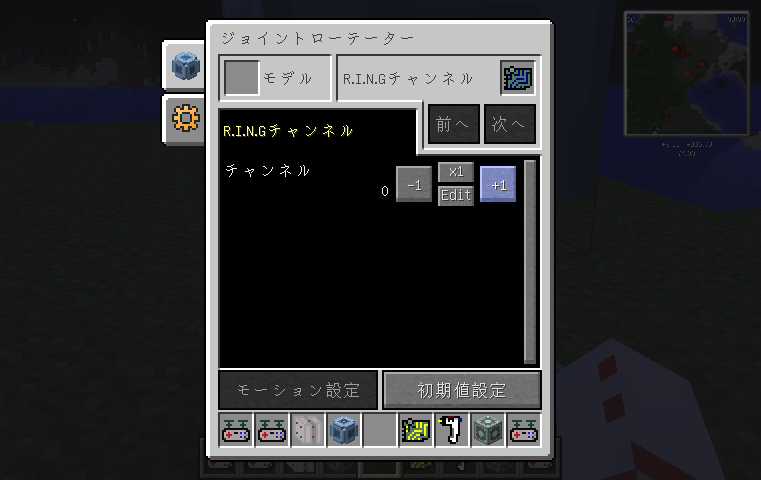
●チャネル 「指令先」
指示先。 指示するブロックには「R.i.N.G.チャネルMCTRL」を入れて番号を割り振る
モーションチャネルとアクションチャネル以外に、移動指示チャネル(前後左右上下)
キー指示チャネル(シート&キー)がある。>kwsk
モーション用とアクション用は番号共通だけどチャネルは別
●ターゲット 「記録されてる標的」
1~5までセットできる。キャラクター以外にもアイテム、ブロック、
座標など色々対象にできる。
チャネルと違って消せないので、入ったら入りっぱなし。
ノードで探させる以外にアイテムの「ターゲットサイト」で指示する事も出来る。
Itemをターゲット
Mobをターゲット
ブロックをターゲット ※configを変更する必要があります。
●センサー 「5つあるけどチャネルは1つ。。。」
センサーMCTRLをどこかのブロックに入れると数値を拾えるようになる。
0~10まであって0の機体センサーはコア自体がセンサーになるらしい。
センサーを入れた位置は重要で、ターゲットxとセンサーxの位置関係で座標をさがす。
動くブロックやコアから離れたブロックにつけて、ターゲット移動させると
ユニットがびくんびくんすることもある。
逆に銃口を敵に向けるときは銃口につけとかないと相手に向かない。
●Entity 「動いてるキャラクター情報」
マイクラ上で動いてるモノに与えられるIDの事。
MOBやプレイヤー以外に、トロッコや矢、落下するTNTなんかもEntity情報を持つ。
移動速度や落下速度、延焼判定などなど、それぞれにされるらしい。
Wikiに数値とかも詳しく書いてあるので、興味のある方はどうぞ
※?マークの所の198とかがそう。チャンクに出現したとき自動で割り振られる
──────────────────────────────────────
2章 各ノード解説
■ノード詳細
ノード内の項目と各ノードの動きを分析、解説していきます。
{kind=link}
※出力や解説は、同類のノードで共通のものが結構あります。
その辺りは[共通]として、別記してます。見難い( ・´ω`・)
項目解説の書式
以下の書式で各ノードの項目を解説していきます。
ノード名称 ![]() ノードの概要
ノードの概要
-項目名
選択可能項目名1>項目名2>以後順送り
[出力]
#各ノードの出力する内容
※青文字はmemoとか注意とか、ゲーム内に書かれてない事。
※出力される数値については、
コマンド/jbdr 0でデバックしてみると判りやすいです。
プルプル震えてるのが実行されてるノードで、
(非常に早いですが順番に実行されてます。)
内側に書かれた1,0や数値、ERRが出力された数値です。
[解説]
#ゲーム内で書かれているノードの解説を要約したもの。
理解できなかった部分は本文をそのまま載せてあります。
※青文字はmemoとか注意とか、ゲーム内に書かれてない事。
─ ─ ─ ─ ─ ─ ─ ─ ─ ─ ─ ─
●指示系ノード(DR:DirectionNode)
共通項目
[出力(DR系基本)]
#チャネル登録されたノードは残り時間を出力
真偽判定は1(TRUE)
#チャネル登録されていない、チャネル登録失敗、
処理終了したノードは0(FALSSE)
※つまり動いてる間は数値が入ってて、動いてないと0が入る。
[解説(共通)]
#終了時にチャネルより取り除かれる。
(各チャネルはひとつのノードのみ登録可能(先勝ち))
モーション変更指示ノード
・ローテータ 「ロテタを回す。」
-チャネル ※チャネルMCTRLのモーションチャネル番号に対応。
0にすると全部が回ってしまうので1以降で。
-実行タイプ
セット>加算 ※セットが初期値変更、加算がモーションって所。
-時間(Tick) ※設定Tickかけて下に設定した角度曲がる。←これ重要
10度に設定してもTickを長くとるとユックリ曲がる。
最大値最小値の概念はない。バネとか振り子とかもない。
なので、回したら別ノードで戻す必要がある。
面倒な場合はチップ入れて汎用キーを実行させるといい。
※命令を与えたらこのTick時間を過ぎてなくても、次のノードに
に移動してしまうので注意。
-後ろに持ち上げる※x軸への回転スピード
-時計回りに廻す ※y軸への回転スピード
-右へ開く ※z軸への回転スピード
・エクステンダー 「エクスを伸ばす。」
-チャネル ↑うえさんしょう
-実行タイプ
セット>加算
-時間(Tick)
-伸縮度
・スライダー 「スライダーを動かす。」
-チャネル ↑うえさんしょう
-実行タイプ
セット>加算
-時間(Tick)
-左へスライド※x軸への移動スピード。1ブロック64で、128まで行くと折り返す。
-上へスライド※y軸への移動スピード。1ブロック64で、128まで行くと折り返す。
-前へスライド※z軸への移動スピード。1ブロック64で、128まで行くと折り返す。
・スケーラー 「スケーラーを動かす。」
-チャネル ↑うえさんしょう
-実行タイプ
セット>加算
-時間(Tick)
-縮尺
[出力]
#DR系基本(上参照)
[解説(モーション変更DR共通)]
#チャネルへ自身を登録
次TICK以降に指定TICKをかけてモーション値の更新
終了時にチャネルより取り除かれる。
(各チャネルはひとつのノードのみ登録可能(先勝ち))
※1Tickたたないと実行されないので、1Tickは上書きできない。←これ重要
連続で命令すると飛ばされるので、1Tickウェイトを入れるか、
IFジャンプSDでノードが終わるまで待たせる事。
アトラクター指示ノード 「アトラクターを動かす。」
-チャネル ※動かしたいR.I.N.G.チャネルMCTRLの番号を入れる。
-機能
有/無効切替
>有効化
>無効化
>パージ パージ期間(Tick)0~200
>TE遮断信号 TE遮断範囲0~16 TE遮断機関(Tick)0~200
※Ver0.8で追加 基本的に汎用キーで操作するのと同じ。
アクション指示ノード 「チャネルへアクションを指示」
-チャネル
-時間(Tick)
[出力]
#DR系基本(上参照)
[解説]
#アクションチャネルへ自身を登録
次TICK以降に指定TICKをかけてモーション値の更新
※指定チャネルにアクションさせる。
チャネルMCTRLを武器モデルの入ったブロックに入れて、アクションを「する」
にしておけば、これでアクションさせれる。
アクション自体は、汎用キーをいつもの様に設置しといて、「キー使用指示ノード」で
実行させてもいい。
エフェクト指示ノード 「音やパーティクルを指示する。」
-チャネル ※動かしたいR.I.N.G.チャネルMCTRLの番号を入れる。
-時間(Tick)※再生時間?
-エフェクトスロット ※コアGUIのエフェクトタブで設定したスロット番号を入れる。
[出力]
#DR系基本(上参照)
[解説]
#アクションチャネルへ自身を登録
次TICK以降に指定TICKをかけてモーション値の更新
※Ver0.8で追加 コアGUIで設定した番号のパーティクル、
またはエフェクトを実行させる。コアの設定については「Ver0.8検証」参照
※R.I.N.G.だけではだめで、使いたいチャネルを設定したR.I.N.G.チャネルMCTRLを
どこかのブロックに設置する必要がある。
ターゲット回転ノード 「ロテタの向きをターゲットに向ける」
-チャネル ※動かしたいチャネル番号を入れる。
-ターゲット番号
(オーナー)0番< 1番>2番>3番>4番
※事前に「ターゲット設定指示ノード」で
Entity情報を指定ターゲット番号に入れとく事。
-実行タイプ
-タイプ
xy両方>yのみ>xのみ
-回転制限
※コアからの向きになるので調整がいる。
[出力]
#DR系基本
[解説]
#モーションチャネルへ自身を登録
次TICK以降にターゲットへ向けて回転
移動指示ノード 「指示した方向に移動する。」
-移動ch
前後>左右>上下
-方向
前>後>後ろ(ダブル)・・・・・左右上下とかもえらべる。ダブルはステップとか。
-時間(Tick) ※回転と違い、指定Tick時間のあいだ移動する。
※各ユニットタイプに合わせて移動する。
ヘリやエアクラなら上にも移動する(際限なくどこまでも)
飛べないユニットタイプの場合はジャンプする。
[出力]
#DR系基本
[解説]
#移動軸チャネルへ自身を登録
次TICK以降に指定TICKの間だけユニットを移動
移動タスク指示ノード 「追いかけたり逃げたりさせる。」
-タイプ
追従する>遠ざかる>周囲を徘徊する>自由に徘徊する
※周囲の場合、ある程度離れると追従してくる
自由の場合はランダム。
(アルゴリズムが同じなのか、ユニットを並べると同じ動きをする)
!歩行系とホバー・ヘリだけの対応です。
エアクラフト・フロート・宇宙などは未実装
-ターゲット番号
0番(オーナー)< 1番>2番>3番>4番>5番
-時間(Tick)※指定時間、命令を出してるので、その間出力が1
これ変更しても10歩以上歩く。。。
[出力]
#DR系基本
[解説]
#移動タスクチャネルへ自身を登録
次TICK以降に指定TICKの間だけタイプに合わせ移動処理
Yaw更新指示ノード 「ユニットの向きを変える」
-実行タイプ
セット>加算※セットは絶対値方向に向く。0で北向くわけ。
-時間(Tick)
-セット時:Yaw(ワールド絶対値)/加算時:右(左)へYaw回転
※小数点以下の数値も設定できる
ターゲット状態検知ノードでYaw差を取ってこれば、相手に向ける事が出来る。
[出力]
#DR系基本
[解説]
#Yaw回転チャネルへ自身を登録
次TICK以降に指定TICKをかけてユニットのYaw値の処理
※ブロックではなく、コア自体の向きかえる。
ただし、シート1に乗ってるとプレイヤーの向きを優先する。
また、シート2以降に乗ってる場合、ユニットの向きは変わるけど、
プレイヤーの向きは変わらない。
Yaw追従指示ノード 「シートの向きにユニットの向きを変える」
-座席番号
-時間(Tick)
-タイプ
等速>加速>減速
-Yaw速度
[出力]
#DR系基本
[解説]
#Yaw回転チャネルへ自身を登録
次TICK以降に指定TICKの間ユニットのYaw値の追従処理
#等速 追従方向へ常に一定のYaw値を加算
#加速 追従差が小さいほど指定した加算値に近づく
#減速 追従差が大きいほど指定した加算値に近づく
※シート1に乗ってる時は、権限movで移動制限しないと効果がない。
シート2以降に乗ってる場合、そちらの向いてる方にユニットが向く
前進してる時にシート2にYaw追従させると、トレーラーの様な動きになる。 www.nicovideo.jp
キー使用指示ノード 「汎用キーを使用させる。」
-座席番号
1番>~4番
-キー番号
汎用キー1>~8
-時間(Tick)
-シングル/ダブル
通常>
[出力]
#DR系基本
[解説]
#モーションチャネルへ自身を登録
次Tick以降に指定TICKの間指定座席の指定キーを使用状態にする。
終了時取り除かれる
※座ってる座席に関係なく実行されるので、実質キーの拡張ですね。
1~8×シート1~4の32個まで指示できる。
アイテム使用指示ノード 「アイテムMCTRLを使用させる。」
-座席番号
1番>~4番
-アイテムACT
青 左クリック>青右>赤左右>緑左右>黄左右
-時間(Tick)
[出力]
#DR系基本
[解説]
#モーションチャネルへ自身を登録
次Tick以降に指定TICKの間指定座席の指定アイテムを使用状態にする。
終了時取り除かれる
※キー指示同様
汎用キーからアイテムを動かせるので便利。
ただし、起動間隔はアイテムと違い、汎用キーと同じになる。
(右でも単発じゃなく連打)
こっちもシートに関係なく設定できる。
Entity検索指示ノード 「センサーに何を探すか指示する」
-センサー番号
0(機体センサー)<1番>~10番
機体センサーの座標はコア底面になるらしい。
1~10番はセンサーMCTRLの入ったブロックの中央
-範囲
0~64(ブロック数 Ver0.8以前は32)
-ソート順
距離が違い順に>射線に近い順に
-IFFタグ
全て>味方>敵
-検出タイプ
生物全般
>プレイヤー
>ユニット
>アイテム
>クリーチャー
>動物
>村人
>ボス
>全て
>ハッシュ指定
-ハッシュ(ハッシュ指定時のみ MOBやITEM、ブロックの固有番号 )
0>~9(代入ノードを参照させた場合は何桁でもOK)
JointBlock弾:17436(共通)
地面に落ちたアイテム:-4335(共通)
・ハッシュ調査 https://ch.nicovideo.jp/makara/blomaga/ar1885174#-
>クリア Ver0.8で追加 センサー状態検知ノードに読ませると検索結果を消せる
[出力]
#DR系基本
[解説]
#検索チャネルへ自身を登録
次TICKにEntityの検索処理
※センサーに指定した対象を探させるノード。
探して?って指示したらあとは何もしてない。
なので、見つけた後は「センサー状態検知ノード」で
センサーから取り出してどっかに入れるの。
・範囲内に対象が居ないとErrが入る。
・連続して見に行くと重く成るっぽい
ターゲットに入れちゃったら後はほっといてもいい。
逆にターゲットに入ったらセンサーが見失ってもタゲられてる(´・ω・`)
センサーは10個設置することができるが、センサーチャネルは1つしかないので、
処理が終わるまで次のセンサーを使用する事ができません。
(ウェイトノードを挟むか、ノードがFALSになるまでループさせるなど。)
ターゲット指示ノード 「距離とかターゲット情報を取り出す。」
-ターゲット番号
1>~5
-タイプ
Entity
-EntityID(Entity時)
>ブロック座標
-座標x(ブロック座標時)
-座標y(ブロック座標時)
-座標z(ブロック座標時)
>ターゲットクリア Ver0.8で追加。指定番号のターゲット情報を消す
[出力]
#設定成功時または、すでに同じ値の時はTrue(1)
設定失敗時はFalse(0)
[解説]
#指定番号のターゲットを設定
※ノード自体には1か0しか入ってないけど、ターゲット番号内に
座標やEntityが格納されるっぽい。
chクリアノード 「いろんなチャネルをクリアさせる」
-chタイプ
モーションch>アクションch>移動軸ch>入力ch
-チャネル(各chタイプに対応したチャネルを選択
-座席番号(入力chの場合のみ)1番席>2>3>4番席
[出力]
#常にFALES(0)
[解説]
#各チャネルのクリアを行います
Ver0.8で機能実装
※強制的にチャネルをクリアするノード。
移動指示ノードで動いている場合は、即座に止まるわけではなさそう。
大抵のチャネルは、1tickたたないと動かず、動くまでchにとどまるので、
場合によってはこれで消してやるのもいいかも。
ただし、思ったような挙動にならないことが多い。
モード変更指示ノード 「モード変更させる。」
-タイプ
初期値モード>スレーブスロット
-モード
初期値モードの場合:0>~127
-メイン/サブタイプ
初期値モードの場合:変更しない>メインタイプ>サブタイプ
※アドオンのサブタイプを入れて置けば、初期値変更に合わせて、
タイプも変更できるらしい。
-スロット
スレーブスロットの場合:オフ>~10
※R.I.N.G.なら、一定秒後に切り換えとか組めるので面白いかも?
[出力]
#ユニットがすでに指示モードの場合またはモード変更に成功した場合Ture(1)
[解説]
#ユニットの各種モード変更を行う。
※未完成時は別ワールドでのテストか、直後にウェイトノードを
入れる事をお勧めします。条件式によっては連続してアセンブルし、
入力を受付なくなります。アセンブル中はダメージも受けないため、
MOD削除するまでユニットを消せなくなります。
Ver0.8.4でも切替中はインベントリを開けないので注意
─ ─ ─ ─ ─ ─ ─ ─ ─ ─ ─
●構文系ノード(ST:SyntaxNode)
空ノード 「ジャンプ先とか見やすくする為とか」
[出力]
#常に0(FALSE)
[解説]
#何も行わないノード
※なんもしない(´・ω・`) ジャンプ先を固定する時とかたまに使う。
他のノードにすると変更多いしね。
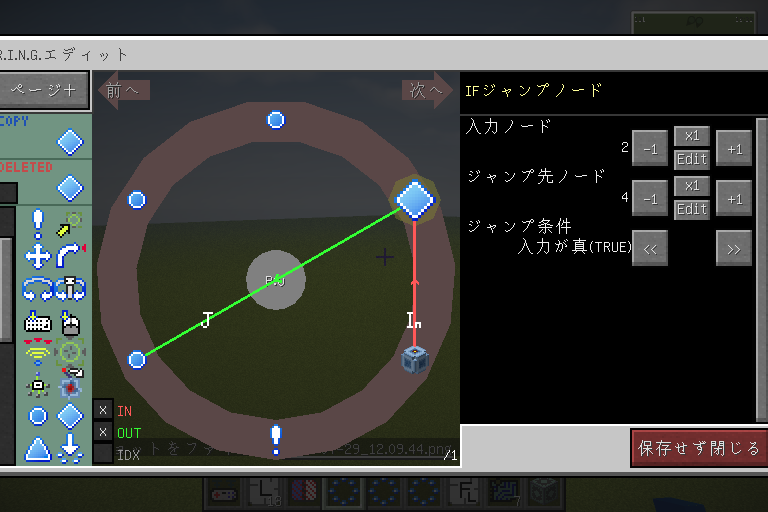
IFジャンプノード 「条件で別ノードに移動」
-入力ノード
0>~23
-ジャンプ先ノード
0>~23
-ジャンプ条件
入力が真(TRUE=0以外の数 多くは1)
>入力が偽(FALSE=0)
>入力がエラー
>入力がエラーでない
[出力]
#常に0(FALSE)
[解説]
#入力ノードの出力と条件を照らし合わせ
合致した場合、指定ノードへジャンプ
※よく使うのは、動いてる時TRUEで飛ばして、動いてない時FALSEで飛ばすやつ。
ウェイトノード 「まつ。1Tickは1/10秒」
-時間(Tick)
1~?
[出力]
#常に0(FALSE)
[解説]
#指定したTICKだけ留まる
※指示系ノードって1Tickたたないとチャネルが空かないので、
これ置いとくと空になって便利。
だけどウェイトで止まってる間、他のノードは動かないので、
段々動きがズレてく。多用しない方がいいかも?
おすすめはロテタ回して動いてる間はジャンプで飛ばすやつ。
他リング呼出ノード 「べつのページに移動する。」
-ページ番号
-ノード番号
[出力]
#代入ノードや遷移系ノードから内部値を上書き可
#保持する実数値を返す。
#整数を受取るノードには整数を返す。
#真偽を問合せるノードには整数に直して0の時は0(FALSE)
マイナスを含む0以外の場合は1(TRUE)を返す。
※次のリターンノードで戻る時、値を変えれる。
[解説]
#指定ページの指定ノードにジャンプする。
#戻る場合は呼び出しページにリターンノードを設定する
※ 先のノードを動かすと自動で呼び出しノード設定も変わる。
入れ子(呼び出し先での呼び出し)は3つまでで、
以降古い戻り先を忘れるらしい。
同ページ内での呼び出し(ジャンプ)も可。
リターンノード 「元のページにもどる」
-固定値
[出力]
#常に0(FALSE)
[解説]
#呼び出されていた場合、元のノードに戻る
#入力ノードの指定がある場合は指定ノードの出力を、
固定値が設定されている場合は固定値を呼び出し元のコールノードへ代入
※固定値を入れておけば、戻る時、呼び出し元の他リンクSTの値を変えれる。
まぁミラーリンクSTでやればいいんだけど、いちいち戻し先を
指定しなくていいから楽かも。
こんで2週目のとび先を変更して、処理済みなら次は別ページとか出来るね。
変数ノード 「数値を覚えとく」
-初期値
[出力]
#保持する実数を返す
#整数には整数を返す
#真偽を問合せるノードには整数に直して0の時は0(FALSE)
マイナスを含む0以外の場合は1(TRUE)を返す。
[解説]
#実数を保持するノード
代入や遷移系ノードから内部値を上書きすることが出来る。
※よーするに数値の記憶場所。
他から参照したり、代入ノードで書き換えたりする。
まぁ、代入ノードの内部値を使っても良いんだけどね。
2値オペノード 「2つの値を見比べる」
-オペエタイプ
加算(+) 二つの値を足す(マイナス加算すれば減算にもなる)
>減算(-) 二つの値を引く
>乗算(X) 二つの値を掛ける
>除算(÷)剰余(Mod) 二つの値を割る
>等しい(A=B) AがBと同じならTrueを返す
>等しい(整数)(A=B) 未調査
>小なり(A<B) AがBとより小さいとTrueを返す
>大なり(A>B) AがBとより大きいとTrueを返す
>以下(A≦B) AがBと以下ならTrueを返す
>以上(A≧B) AがBと以上ならTrueを返す
>論理積(AND) 未調査 2値がともにTrue
>論理和(OR) 未調査 2値のどちらかがTrue
>排他的論理和(XOR) 未調査 2値がどちらもFales
>Pow(A,B) 累乗。AのB乗
>Min(A,B) 未調査 2値の小さい方?
>Max(A,B) 未調査 2値の大きい方?
>Atan2(A,B) 三角関数、タンジェントAB。
3~-3ラジアンの角度が出てくる。
出た角度を57.2958倍すると角度値になる。
※1値オペのToDag()を使えばおk
>Vec3 Dot(V1,V2) 未調査
>Vec3 Dist(V1,V2) 未調査
>Vec3 Add(V1,V2) 未調査 おそらくベクタ値同士を足す
>Vec3 Sub(V1,V2) 未調査 おそらくベクタ値同士を引く
>Vec3 Cross(V1,V2)未調査
-入力ノードA>固定値A
-入力ノードB>固定値B
-代入先ノード ←代入先ノードの内部値をこれの内部値で上書きする
[出力]
#代入ノードや遷移系ノードから内部値を上書き可
#保持する実数値を返す。
#整数を受取るノードには整数を返す。
#真偽を問合せるノードには整数に直して0の時は0(FALSE)
マイナスを含む0以外の場合は1(TRUE)を返す。
[解説]
いわゆる代入ノード
#2つのノードから数値を算出し保持する(初期は0)
#指定ノードへ結果を代入する。
※いわゆる代入ノード。
AB二つの数値を比べ、その結果を出力するノード。
数値を計算して変更したり、大小関係を比べたり、意外と使う機会が多いかも。
1値オペノード 「色々計算して値を変える」
-オペタイプ
代入(無操作)
>切捨て 端数を切り捨て整数を返す
>四捨五入 端数を四捨五入し整数を返す
>切下げ 端数を切り下げ整数を返す
>切上げ 端数を切り上げ整数を返す
>否定(NOT) 未調査
>Abs(x) 数値の絶対値
>Sqrt(x) √(ルート)計算 ※ピタゴラスの定義
対象とのxyz軸座標差を二値オペノード、Pow(a,2)で累乗して
3つを加算。その値を一値オペノード、Sqrt()に入れると
2座標間の距離が出ます。
ターゲット状態検知で距離は出せますが、ターゲットせず座標だけで
距離を出したい場合はこんな感じ(出る距離が1ブロック単にだしね)
>Sin(x) 三角関数サイン ※三角関数を復習(´・ω・`)
>Cos(x) 三角関数コサイン
>Tan(x) 三角関数タンジェント
>ASin(x) sinの逆関数(アークサイン、逆正弦)※アークって?
>ACos(x) Cosの逆関数(アークコサイン、逆コサイン)
>ATan(x) Tanの逆関数(アークタンジェント、逆タンジェント)
出た値を57.2958倍すると角度になる。(ラジアン変換)
※2値オペのATan2(x)と違って絶対値みたい。
>toRad(x) 未調査 角度をラジアンに変換? 約57.2958で÷
>toDeg(x) 未調査 ラジアンを角度に変換? 約57.2958倍
対象との距離差を「x÷z」してAtan(x)に入れるとラジアン角がでます
それをtoDeg(x)に入れてやると角度が出ます。
この分ローテータを回せば、ローテータが対象に向きます。
編隊を組むR.I.N.G.
>Exp(x) 未調査 指数関数らしい。よくわからん(´・ω・`)
>ベクタX(:0) ベクタ値の内ベクタx(0)番を取得する
>ベクタY(:1) ベクタ値の内ベクタy(1)番を取得する
>ベクタZ(:2) ベクタ値の内ベクタz(2)番を取得する
>ベクタW(:3) ベクタ値の内ベクタw(3)番を取得する
>Vec3 Length(x) 未調査 長さ?
>Vec3 Normalize(x) 未調査 正規化?
>E(定数) 未調査 ネイピア数 「自然対数の底(e)」(´・ω・`)
>π(定数) 未調査 円周率 3ぐらいのやつ
>Err(定数) エラーを出力
>乱数 乱数を発生させる。0.00~1.00まで
※いっぱいあるね! 三角関数とか乱数とか面白そう。
2018.10/3加筆
-入力ノード>固定値 ←この値を上の式で計算して、内部値を上書きする
-代入先ノード ←代入先ノードの内部値をこれの内部値で上書きする
[出力]
#代入ノードや遷移系ノードから内部値を上書き可←計算結果を内部値に入れる
#保持する実数値を返す。
#整数を受取るノードには整数を返す。
#真偽を問合せるノードには整数に直して0の時は0(FALSE)
マイナスを含む0以外の場合は1(TRUE)を返す。
[解説]
#1つのノードから数値を算出し保持する(初期は0)
#指定ノードへ結果を代入する。
(論理演算の結果は0または1で保持)
(ノードを通らない限り出力は更新しない)←これ重要
※いわゆる代入ノード。
乱数は0.001~1.000の間の数字を生成するみたい。
小数点以下なので、2値オペノードで乗算して整数に直すといいです。
ミラーリンクノード 「別ページのノードの値を参照する」
-ページ番号
-ノード番号
-外部リンク
しない>自分>マスター
-R.I.N.G.スロット番号
0>1>2>3
[出力]
#代入ノードや遷移系ノードから内部値を上書き可
#リンク先に出力を返す
#リンク先が自分の場合または、参照が不正の場合0(FALSE)
[解説]
#他ページまたは自ページのノードへと出力・入力をバイパス
ページをまたいで値を渡す場合に使う?
※いわゆる代入ノード。
別ページから値を引っ張ってくるのに使う。
R.I.N.G.外や、スレーブ時にはマスターの数値も持ってこれるので、
使い方によっては面白いかも。
マスターからスレーブのR.I.N.G.を直接動かす事はできないので、
マスターのR.I.N.G.の数値を変えて、ミラーリンクでその数値を見て動かす
なんてことも出来るんだろうね。
※ミラーリンクノードに代入すると、参照元の数値も代入された数値になる。
外部リンクさせている場合は、マスター側ノードの数値も変えることが出来るので、
スレーブ→マスター間、マスター→スレーブ間で数値をやり取りすることが出来る。
(マスター側は一方的に参照、受け渡しされるだけだけどね。)2018.8/29加筆
ベクタノード 「4つの数値を同時に扱うノード」
-値0
-値1
-値2
-値3
[出力]
#保持する実数値を返す。
#整数を受取るノードには整数を返す。
#真偽を問合せるノードには整数に直して0の時は0(FALSE)
マイナスを含む0以外の場合は1(TRUE)を返す。
[解説]
#0~3の入力データを保持
#ベクタ出力のあるノードを参照した場合、対応した判数の出力を取得
※並列計算用のノード。
検知系ノードの一部で座標など4つの値を同時に取得するノードがあり、
それを一括記憶する為のノード。
1値オペノードの「ベクタ(:)」により個別に出力する事ができる。
また2値オペノードの「Vc3 ・・・(V1,V2)」でベクタ計算が可能。
(よくわかってないけど。)
2018.10/3加筆
─ ─ ─ ─ ─ ─ ─ ─ ─ ─ ─ ─
●検知系ノード(TG:TriggerNode)
[出力共通事項]
#最初に問い合わせされた時点で出力値を算出更新
以降同じTick内では出力が固定
キー状態検知ノード 「汎用キーが押されてるか見る」
-座席番号
1番>~4番
-キー番号
汎用キー1~8>前後左右上下>マウスホイル上下
-シングル/ダブル
通常>ダブル ←ダブルでキーを叩いても、シングルはシングルで反応する。
[出力]
#押されていれば1(TRUE) 押されてなければ0(FALSE)
[解説]
#キー入力状態を出力
アイテム状態検知ノード 「アイテムMCTRLを使ってか見る。」
-座席番号
1番>~4番
-アイテムACT
青 左右>赤>緑 >黄
[出力]
#押されていれば1(TRUE) 押されてなければ0(FALSE)
[解説]
#アイテム入力状態を出力
※通常通り、右クリックは間隔をあけた連打、左クリックは単発になる。
連射させたい場合は、アクションのTick時間を延ばせばそれっぽくはなる。
座席状態検知ノード 「座ってるかとか座席の状態をみる。」
-座席番号
1番>~4番
-検出タイプ
座席タイプ
>プレイヤー騎乗
>Entity騎乗
>Entity大別
>Entity名ハッシュ
>EntityID
・ハッシュ調査 https://ch.nicovideo.jp/makara/blomaga/ar1885174#-
[出力]
#検出タイプによって実数、整数、または真偽値を出力
[解説]
#座席状態に従って値を出力
※お、座ったやつのEntityID拾えるんだ。
プレイヤー状態検知ノード 「HPとかENとかプレイヤーの状態を見る。」
-座席番号
1番>~4番
-検出タイプ
ピッチ
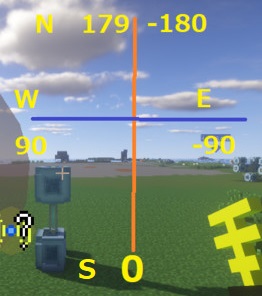
>Yaw(ユニット相対)そのユニットとの差 シート1だと強制的に同じになる。
>Yaw(ワールド絶対)向いてる向き。180~-180
南が0で時計回りが+、反時計回りが-
北が180、西が+90東が-90
>腕スウィング スレーブでくっ付いてる時にもシート1で数値取れる
[出力]
#検出タイプによって実数、整数、または真偽値を出力
[解説]
#プレイヤーの状態に従って値を出力
※ユニットをシート1以外のプレイヤーと同じ方向を向かせる場合は相対を使う。
ユニット移動検知ノード 「向きとか移動状態を見る。」
-検出タイプ
Yaw(ワールド絶対値)
>移動中
>移動中(回転含)
>上昇中
>下降中
>空中
>ジャンプ中
>飛行中
>滞空/潜行 Ver0.8より2タイプ兼用に
>ダッシュ中
>スピンレート ローターや助走の状態
>腕ふり率 振りはじめかの状態(0~1)角度ではない。
>地表距離(10迄)
>ゼロ重力
[ 出力]
#検出タイプによって実数、整数、または真偽値を出力
[解説]
#ユニットの移動状態に従って値を出力
※ユニットの移動方向は検知できない。
ワールド絶対値はこんな感じ。
南を0として時計回りが+方向で西は90。 反時計回りが-方向で東は-90。
北は179を境に-180に変わる。
※そのためyaw179と-180は359度離れてることになり、
yaw差分回転指示すると時計回りに1回転する。
ユニット状態検知ノード 「HPやスレーブ、HPなどの状態を見る。」
-検出タイプ
初期値モード 現在の初期値レイヤー番号
>スレーブ状態 マスター=0 スレーブ=1
>スレーブスロット スレーブ時の番号
>マスターE接続 マスターに接続している場合1
>マスターT接続 アセンブルしたマスターが存在しない場合1
>体力 体力残量
>EN EN残量
>ENプール 燃料残量
>体力レート ユニットの体力残量率(100%=1)
>ENレート ユニットのEN残量率(100%=1)
>EntityID ユニット自身のEID
[出力]
#検出タイプによって実数、整数、または真偽値を出力
[解説]
#ユニットの状態に従って値を出力
ch状態検知ノード 「各チャネルの動いてる状態を見る。」
※Ver0.8より機能
-chタイプ
モーションch
>アクションch
>移動軸ch
>入力ch
-チャネル
各対応チャネルを選択
[出力]
#現在アクティブなノードの出力を返します。
[解説]
#各チャンクの状態に従って値を出力
※移動指示で動いてる場合、移動chをクリアしても動くみたい。
センサー状態検知ノード 「各センサーの座標や状態を見る。」
-センサー番号
1~10番
-検出タイプ
センサー座標x
>センサー座標Y
>センサー座標Z
>センサー座標ベクタ
>前方方向ベクタ ? 絶対方向っぽい。北が1で南が-1みたいな
>検索結果0~3 Enthityを入れる場所 4つタゲを保管できる
>検索結果ベクタ
>パーツID Ver0.8で追加 センサーを入れたブロックのIDが解る。
IDは固定ではなくコアから遠いブロックほど大きいIDが割り振られる
>センサーが有効か
[出力]
#検出タイプによって実数、整数、または真偽値を出力
[解説]
#センサーの状態に従って値を出力
検索結果0~3は見つけた対象のEntityIDが入ってるっぽい。
他はセンサー自体の情報で殆ど位置情報かな。
検索結果0~3は見つけた順番に埋まってくらしい。
1以降は複数ロックオンした時入れて使えば切り替えに使える。はず。
検索結果に数値を入れる方法はこれしか無いっぽい。ぽい。
検索結果は書けるけどchみたいには消せない(´・ω・`)
ターゲット状態検知ノード 「各ターゲットの向きや状態を見る。」
-センサー番号
1~10番
-ターゲット番号
1~5番
-検出タイプ
距離> 相手との距離(ブロック)少数点まで出てる。
Yaw差>正面を0度とした、相手のいる角度。左がマイナス右がプラス
これを使えば偏差撃ちなんかも出来るし、正面に居ない時は追いかけない
などのコントロールが出来る。
Pitch差>正面を0度とした、相手のいる角度。上がプラス、下がマイナス
有効か>
Tg-S差x>ターゲットとのx軸のみの距離差?
Tg-S差y>ターゲットとのy軸のみの距離差?
Tg-S差z>ターゲットとのz軸のみの距離差?
Tg-S差ベクタ>ベクタ値距離差?
ターゲット座標x>ターゲットのx座標
ターゲット座標y>ターゲットのy座標
ターゲット座標z>ターゲットのz座標
Tg座標ベクタ>ターゲット座標のベクタ値(XYZ)
対象がEntityか>
ターゲットEID ターゲットのEntityID
[出力]
#検出タイプによって実数、整数、または真偽値を出力
[解説]
#ターゲットとセンサーの状態に従って値を出力
※センサーは、ターゲットとの距離や向きを出すのに使う。
ジョイントパーツ状態検知ノード 「ブロックの初期値やモーション状態を見る。」
※Ver0.8より追加
-パーツID 0~? IDは固定ではなくコアから遠いブロックほど大きいIDが割り振られる
固定番号で指定する事も出来るが不安定なので、
前後のブロックにセンサーを入れてセンサーTGで拾う方がヨイ
-検出タイプ
>ジョイント種別 0コア 2シート 4ノーマル 8ローテータ
10エクステンダー 12スケーラー 14スライダー 15アトラクター
>パーツ深度 コアからのブロック数
>現在回転x>現在回転y>現在回転z>現在伸縮>現在値ベクタ
ブロックの現在値 ベクタの値はxyz伸縮%
>初期値A>初期値B>初期値C>初期値D>初期値ベクタ
ブロックの初期値 ブロックによってABCDの内容は変わる
アトラクターやシートなども数値が取れる(スロット番号とかインターフェースとか)
>親パーツID そのまま。大抵はそのパーツ-1番
>子パーツID(下方) y座標が下のパーツのID
>子パーツID(上方) y座標が上のパーツのID
>子パーツID(後方) x座標が後のパーツのID
>子パーツID(前方) x座標が前のパーツのID
>子パーツID(右方) z座標が右のパーツのID
>子パーツID(左方) z座標が左のパーツのID
>子パーツID(自動) 自動で子パーツを探します。複数ある場合はIDの若い方?
大抵は自動でいいと思う。
パーツIDはブロックを組む際、下記の様に「下上後前右左」の順に割り振られる。
優先先にブロックが追加された場合、以降のIDはトコロテン式にズレていく。
Entity状態検知ノード 「対象の向きや座標、状態を見る。」
-EntityID
-検出タイプ
生存しているか>死んでたらFales(0)
座標x >座標
y >座標
z >座標
座標ベクタ>ベクタ座標
Pitch >向いてるピッチ角(上下方向の角度)
Yaw >向いてるヨー角(左右の角度)
目座標ベクタ >?
視線ベクタ >視点の向いているベクタ値 ワールド絶対方向っぽい?
騎乗している >乗ってたらTure
騎乗されている>乗られてたらTure
移動中 >移動してたらTure
上昇中 >上降中はTureらしい?
下降中 >下降中はTureらしい?
騎乗EID >対象に乗ってるEntityのID(馬をタゲった時その騎手のIDとか
非騎乗EID>対象が乗ってるEntityのID(馬とか豚とかユニットとか)
攻撃EID >攻撃対象のEntityのID
復讐EID >ヘイトがこちらに向いているEntityのID?
Entity大別> Enthity区分 2が動物 6がイカ 99がその他とかそんなん
Entity名ハッシュ 個別に設定されてる番号
Enthity検索指示ノードなどでハッシュ指定できる。
弾「17463」
>色々調べてみた
https://ch.nicovideo.jp/makara/blomaga/ar1885174#-
[出力]
#検出タイプによって実数、整数、または真偽値を出力
[解説]
#対象Entityの状態に従って値を出力
※指定したEntityの情報。 EIDはEntityIDのこと。
ハッシュってなんだ。
Block状態検知ノード 「指定座標ブロックの状態を見る。」
-座標x 座標 ターゲットやEnthityなど他の検知系から取得する。
-座標y 座標 ターゲットやEnthityなど他の検知系から取得する。
-座標z 座標 ターゲットやEnthityなど他の検知系から取得する。
-検出タイプ
空ブロックか
>ブロックID
>メタ値
>ノーマルか
>不透明か
>移動を阻害するか
>固体か
>液体か
>硬さ
>不透明度
>光出力
>LS供給可能
>LS入力値
>LS関節入力値
[出力]
#検出タイプによって実数、整数、または真偽値を出力
[解説]
#対象座標ブロックの状態に従って値を出力
※Configの「enableOverpowerNode」をTRUEにしないと使えない。
理由は鉱物の場所とか解ってネタバレしてしまうから。

──────────────────────────────────────
■関連ノード用のサンプルとか、ノードを使ってるR.I.N.G.動画へのリンクとか置くかも。
●指示系ノード(DR:DirectionNode)
・モーション更新指示ノード(ローテータ)
・モーション更新指示ノード(エクステンダー)
・モーション更新指示ノード(スライダー)
・モーション更新指示ノード(スケーラー)
アトラクター指示ノード
アクション指示ノード
エフェクト指示ノード
ターゲット回転ノード
移動指示ノード
移動タスク指示ノード
Yaw更新指示ノード
Yaw追従指示ノード
キー使用指示ノード
アイテム使用指示ノード
Entity検索指示ノード
ターゲット指示ノード
chクリアノード
モード変更指示ノード
──────────────────────────────────────
●構文系ノード(ST:SyntaxNode)
空ノード
IFジャンプノード
ウェイトノード
他リング呼出ノード
リターンノード
変数ノード
2値オペノード
1値オペノード
ミラーリンクノード
ベクタノード
──────────────────────────────────────
●検知系ノード(TG:TriggerNode)
キー状態検知ノード
アイテム状態検知ノード
座席状態検知ノード
プレイヤー状態検知ノード
ユニット移動検知ノード
ユニット状態検知ノード
ch状態検知ノード
センサー状態検知ノード
ターゲット状態検知ノード
ジョイントパーツ状態検知ノード
Entity状態検知ノード
Block状態検知ノード
──────────────────────────────────
更新履歴(加筆・修正・追加・削除)
2019.6/15 パーツノードに加筆
2019.3/2 Ver0.8対応で、アトラクターDR、エフェクトDR、パーツTGなど追加
2018.12/24 目次検知系ノードに加筆、1値・2値オペの三角関数を加筆
2018.10/3 2値オペ、1値オペ、ベクタノードなどに加筆
2018.9/24 概要説明とIFジャンプの仕組みを加筆
2018.8/29 ミラーリンクノードに加筆
2019.6/15 パーツノードに加筆
2019.3/2 Ver0.8対応で、アトラクターDR、エフェクトDR、パーツTGなど追加
2018.12/24 目次検知系ノードに加筆、1値・2値オペの三角関数を加筆
2018.10/3 2値オペ、1値オペ、ベクタノードなどに加筆
2018.9/24 概要説明とIFジャンプの仕組みを加筆
2018.8/29 ミラーリンクノードに加筆